
CROC: Convex Resolution Of Centroidal dynamics trajectories to provide a feasibility criterion for the multi contact planning problem
Résumé
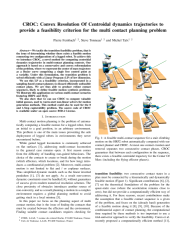
We present a novel method for computing centroidal dynamic trajectories in multi-contact planning context. With dynamic motion it is necessary to respect kinematic and dynamic constraints during the contact planning step. Verifying the feasibility of a transition between contacts increase the success rate of the motion generation along the planned contacts. Our approach is based on a conservative but convex reformulation of the problem where we represent the center of mass trajectory as a Bezier curve, with control points constrained by the initial and final states and one free control point. Thanks to the convexity of this formulation, we can solve it efficiently with a Linear Program of low dimension. We use this LP as a feasibility criterion to test the contact transition candidates during multi-contact planning. By incorporating this criterion in an existing sampling-based contact planner, we are able to produce more robust contact sequences. We illustrate this application on various multi-contact scenarios. We also show that we can compute valuable initial guess, used to warm-start non-linear solvers for motion generation methods. This method could also be used for the 0 and 1-Step capturability problem.
Domaines
Robotique [cs.RO]
Fichier principal
 CROC_iros18.pdf (4.17 Mo)
Télécharger le fichier
iros18_CROC.mp4 (4.61 Mo)
Télécharger le fichier
CROC_iros18.pdf (4.17 Mo)
Télécharger le fichier
iros18_CROC.mp4 (4.61 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Loading...